





新普机械制造厂
日常生活中,人们把装满了垃圾的垃圾袋从桶中取出并打包,容易弄脏双手,简易度和清洁度都不高。
已有的自动化垃圾桶大多着眼于垃圾桶盖的自动开合,但是垃圾有可能接触人手,涉及卫生问题,对于医疗废弃物等双手不宜直接接触的垃圾回收领域,此问题尤其显得突出。
市面上已有半自动的加热封口打包机,但其因依旧需要用手完成收拢袋口的动作而无法解决对不宜直接接触的垃圾的回收问题。另外,申请人已申请了垃圾自动打包方法及垃圾自动打包机(CN3A)。
在一些生产领域也需要自动打包机,避免人工接触或者污染。
技术实现要素:
为了克服现有技术的不足,本发明提供一种全自动打包方法及全自动打包机。
一种全自动打包方法,通过红外检测盛满度;减速电机控制同步带缩口,完成包装袋的收拢动作;通过托桶上的转盘转动,带动安装在转盘上的扎丝绕袋口旋转,完成包装袋的自动封口;减速电机倒转,同步带恢复原样,放开袋口,取出包装袋。
所述的全自动打包方法,具体步骤如下:
步、红外检测:桶顶边设有红外感应装置,当桶内物品满至标定高度,触发下一收袋动作,进行全自动打包;
所述封口组包括:齿带、转盘、齿轮、电机支架二、第二电机螺钉_连接作用、减速电机二、托桶、挂钩螺钉_连接作用、扎丝、第二挂钩螺钉_连接作用、第五螺钉_连接作用;其中齿带与转盘外圈胶连在一起;转盘内圈与托桶胶连在一起;齿轮与减速电机二过盈配合;减速电机二通过第二电机螺钉_连接作用与电机支架二连接在一起;电机支架二通过第五螺钉_连接作用固定在短竖杆上;短竖杆通过角架七和第七角架螺钉_连接作用固定在中支杆上;中支杆通过角架五和第五角架螺钉_连接作用固定在长横杆上;齿带与齿轮通过齿啮合在一起。
所述的报警控制单元由红外传感器、蜂鸣器和单片机组成,其功能完成如下:当红外传感器检测到垃圾已装满时给单片机一个信号,单片机激发蜂鸣器;本文所述的调速控制单元由减速电机一、减速电机二和所述的单片机组成,其功能完成如下:当人听到警报声时按下开关,驱动电机工作,可以通过单片机对电机进行调速控制。同时在单片机上设置好合适的控制时间,使电机在合适的工作行程中运转。本文所述的转向控制单元由减速电机一和所述的单片机组成,其功能完成如下:在缩口时,由单片机控制电机正转,实现缩口功能;在传感器检测到封口完成后,由单片机控制电机反转,实现放口和同步带回复功能,使已打包好的包装袋能顺利取出以及为下一次打包做好准备工作。本文所述的电池单元由可充放电池、一次性电池或者外接电源中的一种或多种组成,其功能完成如下:为报警控制单元、调速控制单元和转向控制单元提供电能。
实施例1
一种全自动打包机的整机运行过程,以垃圾打包为例:1、铺设一个普通垃圾袋于打包机中,注意垃圾袋袋口向外弯折,覆盖住承重圈和同步带;2、开始使用垃圾桶,投掷垃圾,垃圾投掷过程中,打包机桶口传感器定时检测垃圾溢满程度;3、传感器检测到垃圾质量或垃圾体积达到“可打包量”(可打包量根据不同垃圾、不同使用环境会有所调整),信号传递,蜂鸣器开始工作,提示可以打包;4、打包人听到蜂鸣,通过开关暂停蜂鸣,同时打包机开始工作;5、开关引发减速电机一运转,带动同步带旋转缩口,单片机控制减速电机一在垃圾袋口旋转紧缩成“可打包”结点时暂停;6、在减速电机一暂停时,减速电机二开始运转,带动转盘转动,从而带动扎丝绕上一步形成的打包结点作三到四周圆周运动,完成封口功能;7、封口完成,单片机控制减速电机二停止运动,同时控制减速电机一开始反向运转,直至同步带回复原状,即垃圾打包机恢复原貌。8、桶身倾斜,打包好的垃圾袋自动滑落。
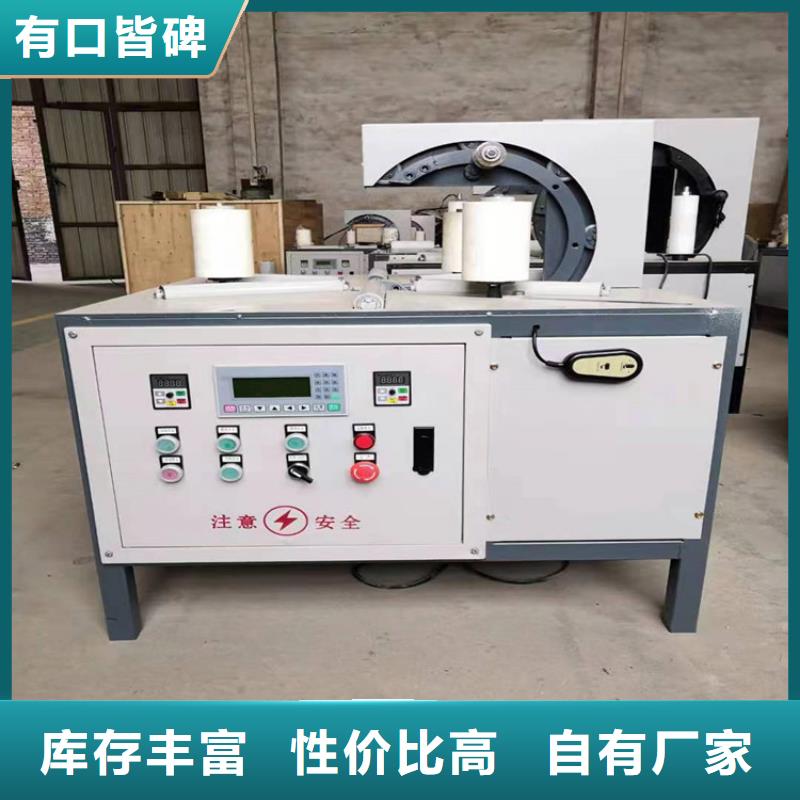
新抚区全自动波纹管绕膜机型号全
 缠绕膜打包机这种控制方式优点是电路简单,维修方便.并能实现启动顺序的连锁,但存在 一个突出问题,即控制线接地。
缠绕机是一款是用缠绕膜包装产品的机器,那么对于他的操作我们了解吗?其实对于购买机器的厂家来说,在购买机器设备之后面临的主要问题就是机器的操作使用问题,这就要求我们的人员熟悉机器的性能特点,缠绕机的基本常识是需要操作人员熟悉了解的。
开关量用的输人、输出映射区,有的称输人、输出继电器,有的称过程映射寄存器 是指可弓实际开关量输入、输出点对应的那部分内存区。它决定了 PLC可能配置的多I/O (开关量)点数。指的也是与输人、输出点有对应关系的内存区。
缠绕膜打包机这种控制方式优点是电路简单,维修方便.并能实现启动顺序的连锁,但存在 一个突出问题,即控制线接地。
缠绕机是一款是用缠绕膜包装产品的机器,那么对于他的操作我们了解吗?其实对于购买机器的厂家来说,在购买机器设备之后面临的主要问题就是机器的操作使用问题,这就要求我们的人员熟悉机器的性能特点,缠绕机的基本常识是需要操作人员熟悉了解的。
开关量用的输人、输出映射区,有的称输人、输出继电器,有的称过程映射寄存器 是指可弓实际开关量输入、输出点对应的那部分内存区。它决定了 PLC可能配置的多I/O (开关量)点数。指的也是与输人、输出点有对应关系的内存区。
 全自动缠绕膜打包机缠绕机的主要电器元件采用进口品牌产品,控制PLC采用进口缠绕机配件,可以保证不会丢失程序。但是在缠绕包装的过程中,要调整薄膜张紧程度是通过调整转盘转速和电机的转速,对缠绕薄膜拉紧力的调整和穿膜这一点是关键,转盘转速越快,电机转动越慢,膜就会越紧。
缠绕机的常见故障及解决办法有哪些呢?新普包装设备给大吉总结了一些缠绕机可能出现的故障及解决办法供大家参考。有时候也得关注自动缠绕机在安装前的注意事项。
全自动缠绕膜打包机缠绕机的主要电器元件采用进口品牌产品,控制PLC采用进口缠绕机配件,可以保证不会丢失程序。但是在缠绕包装的过程中,要调整薄膜张紧程度是通过调整转盘转速和电机的转速,对缠绕薄膜拉紧力的调整和穿膜这一点是关键,转盘转速越快,电机转动越慢,膜就会越紧。
缠绕机的常见故障及解决办法有哪些呢?新普包装设备给大吉总结了一些缠绕机可能出现的故障及解决办法供大家参考。有时候也得关注自动缠绕机在安装前的注意事项。
 封口单元功能完成如下:在胶固于托盘上的转盘外侧胶贴上合适的齿带,组成转盘齿轮,所述转盘齿轮与过盈配合于减速电机二上的齿轮正确啮合;取合适长度的扎丝一端固定于中横杆,一端固定于转盘外圈,当减速电机二旋转时,带动齿轮旋转,从而带动转盘旋转,从而使扎丝饶由缩口单元完成的收缩袋口做圆周运动,完成垃圾袋封口;传感器用于感应打包机是否完成封口,以控制下一步松开袋口动作开始;即减速电机一倒转,直至同步带恢复原样,包装袋可从承重圈上方取出。
如图8,本文所述的报警控制单元由红外传感器、蜂鸣器和单片机组成,其功能完成如下:当红外传感全自动缠绕膜打包机的调速控制单元由减速电机一、减速电机二和所述的单片机组成,其功能完成如下:当人听到警报声时按下开关,驱动电机工作,可以通过单片机对电机进行调速控制。同时在单片机上设置好合适的控制时间,使电机在合适的工作行程中运转。本文所述的转向控制单元由减速电机一和所述的单片机组成,其功能完成如下:在缩口时,由单片机控制电机正转,实现缩口功能;在传感器检测到封口完成后,由单片机控制电机反转,实现放口和同步带回复功能,使已打包好的包装袋能顺利取出以及为下一次打包做好准备工作。本文所述的电池单元由可充放电池、一次性电池或者外接电源中的一种或多种组成,其功能完成如下:为报警控制单元、调速控制单元和转向控制单元提供电能。
一种全自动打包机的整机运行过程,以垃圾打包为例:1、铺设一个普通垃圾袋于打包机中,注意垃圾袋袋口向外弯折,覆盖住承重圈和同步带;2、开始使用垃圾桶,投掷垃圾,垃圾投掷过程中,打包机桶口传感器定时检测垃圾溢满程度;3、传感器检测到垃圾质量或垃圾体积达到“可打包量”(可打包量根据不同垃圾、不同使用环境会有所调整),信号传递,蜂鸣器开始工作,提示可以打包;4、打包人听到蜂鸣,通过开关暂停蜂鸣,同时打包机开始工作;5、开关引发减速电机一运转,带动同步带旋转缩口,单片机控制减速电机一在垃圾袋口旋转紧缩成“可打包”结点时暂停;6、在减速电机一暂停时,减速电机二开始运转,带动转盘转动,从而带动扎丝绕上一步形成的打包结点作三到四周圆周运动,完成封口功能;7、封口完成,单片机控制减速电机二停止运动,同时控制减速电机一开始反向运转,直至同步带回复原状,即垃圾打包机恢复原貌。8、桶身倾斜,打包好的垃圾袋自动滑落。(第八步根据使用者习惯可自选,也可自行拎袋丢弃。)
实施例2
封口单元功能完成如下:在胶固于托盘上的转盘外侧胶贴上合适的齿带,组成转盘齿轮,所述转盘齿轮与过盈配合于减速电机二上的齿轮正确啮合;取合适长度的扎丝一端固定于中横杆,一端固定于转盘外圈,当减速电机二旋转时,带动齿轮旋转,从而带动转盘旋转,从而使扎丝饶由缩口单元完成的收缩袋口做圆周运动,完成垃圾袋封口;传感器用于感应打包机是否完成封口,以控制下一步松开袋口动作开始;即减速电机一倒转,直至同步带恢复原样,包装袋可从承重圈上方取出。
如图8,本文所述的报警控制单元由红外传感器、蜂鸣器和单片机组成,其功能完成如下:当红外传感全自动缠绕膜打包机的调速控制单元由减速电机一、减速电机二和所述的单片机组成,其功能完成如下:当人听到警报声时按下开关,驱动电机工作,可以通过单片机对电机进行调速控制。同时在单片机上设置好合适的控制时间,使电机在合适的工作行程中运转。本文所述的转向控制单元由减速电机一和所述的单片机组成,其功能完成如下:在缩口时,由单片机控制电机正转,实现缩口功能;在传感器检测到封口完成后,由单片机控制电机反转,实现放口和同步带回复功能,使已打包好的包装袋能顺利取出以及为下一次打包做好准备工作。本文所述的电池单元由可充放电池、一次性电池或者外接电源中的一种或多种组成,其功能完成如下:为报警控制单元、调速控制单元和转向控制单元提供电能。
一种全自动打包机的整机运行过程,以垃圾打包为例:1、铺设一个普通垃圾袋于打包机中,注意垃圾袋袋口向外弯折,覆盖住承重圈和同步带;2、开始使用垃圾桶,投掷垃圾,垃圾投掷过程中,打包机桶口传感器定时检测垃圾溢满程度;3、传感器检测到垃圾质量或垃圾体积达到“可打包量”(可打包量根据不同垃圾、不同使用环境会有所调整),信号传递,蜂鸣器开始工作,提示可以打包;4、打包人听到蜂鸣,通过开关暂停蜂鸣,同时打包机开始工作;5、开关引发减速电机一运转,带动同步带旋转缩口,单片机控制减速电机一在垃圾袋口旋转紧缩成“可打包”结点时暂停;6、在减速电机一暂停时,减速电机二开始运转,带动转盘转动,从而带动扎丝绕上一步形成的打包结点作三到四周圆周运动,完成封口功能;7、封口完成,单片机控制减速电机二停止运动,同时控制减速电机一开始反向运转,直至同步带回复原状,即垃圾打包机恢复原貌。8、桶身倾斜,打包好的垃圾袋自动滑落。(第八步根据使用者习惯可自选,也可自行拎袋丢弃。)
实施例2

